gah - GitHub Releases app installer
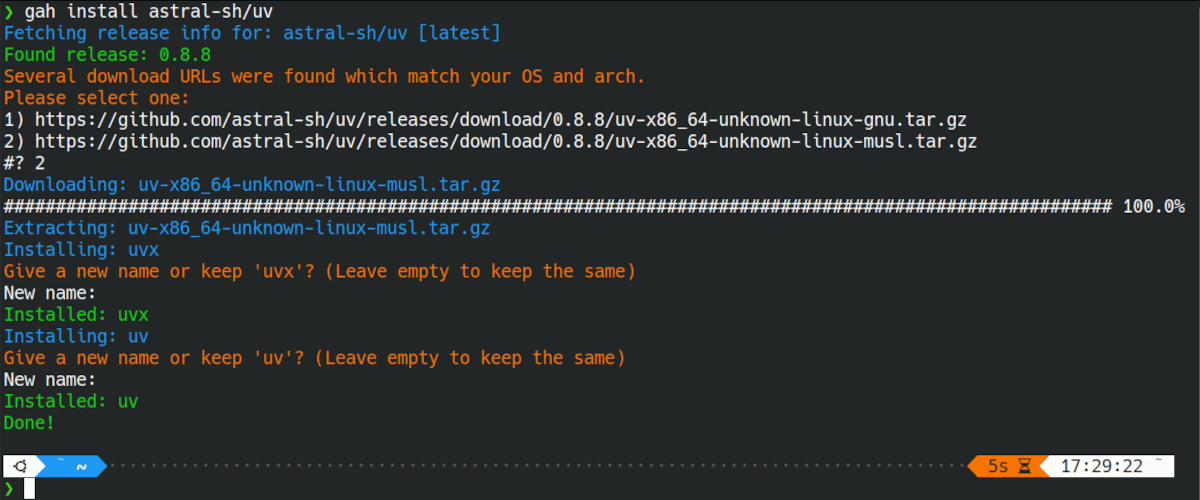
Strasznie nie lubię robić powtarzających się rzeczy, ale takich no... głupich. Co raz więcej aplikacji w formie binarek można znaleźć na GitHubie, a dokładniej w Release'ach. Nic dziwnego - devi tworzą opensource'owe oprogramowanie, udostępniają...